茨城県境町 自動運転バス乗車4 ~自動運転~
自動運転のための機能と実際の走行状況をレポートします。
自動運転のための機能
フランスnavya社の自動運転レベル3対応の車体ARMAです。
ARMAには、走行機能+安全確認機構+自動運転制御ソフトがパッケージされてます。
8台のLiDARと2台のカメラで周囲の安全を確認します。自車位置はGPS(GNSS)です。写真の屋根前方の機器は3D LiDARとカメラ、前方下部は2D LiDARです。写真からは、車内にオリジナルで追加したと思われるカメラ類も見受けられます。


運転席はありません。運行オペレータが1名乗車し車体中央部に立ち、四方の安全を確認しています。運転開始の指示以降は自動運転ですが、周囲の状況によっては即時に手動で対応していました。9割以上は自動運転との印象でした。次のビデオのシーン、路駐車両を回避する際などに手動に切り替えます。
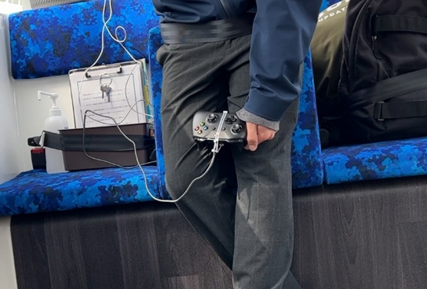
写真は自動運転指示および監視のためのモニターパネルとオペレータの方です。手動運転の際には、ゲーム機のコントローラ状の端末で制御します。ゲーム機のコントローラ状の端末がもっとも操作しやすいそうです。

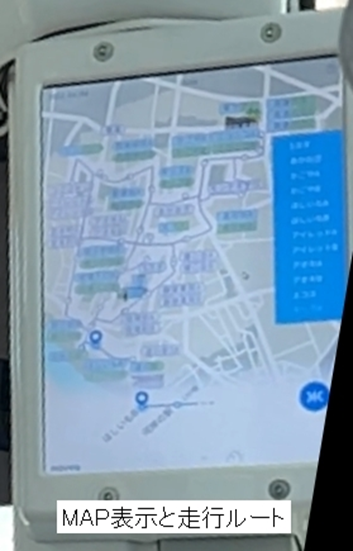
モニターパネルの表示状況を示します。MAP表示では自動運転走行ルートが示されます。ここからあらかじめ設定された目的地を選択し、自動運転開始を指示します。
走行中のLiDAR画像では、LiDARによる周辺物検知情報と自車および走行ルートが示されます。白の点群はあらかじめ計測した物体のデータ、黄の点群はリアルタイムでLiDARが検出した物体です。停留所停車中の画像では、バスの右下に黄色のL字状点群ですれ違った車両の一部が写っています。モニタ画面説明用のビデオでは、このシーンをスロー再生していますのでご確認ください。
ご参考
自動運転「レベル4」法制化と自動運転バス – 技術オフィス Tech-T 開発と製造のコンサルタント

